












Description

Jumbot 1000 - A referência em esvaziamento automatizado de big bags
O Jumbot 1000 é uma estação de esvaziamento de big bags totalmente automatizada, projetada para manusear big bags sem intervenção humana, desde o carregamento até o esvaziamento.
Diferentemente das soluções semiautomáticas do mercado, nosso sistema é baseado em um robô industrial de alta capacidade, capaz de manusear big bags de diferentes tamanhos com total autonomia.
Seu design modular significa que ele pode ser adaptado para atender às necessidades de diferentes setores, seja de plásticos, produtos químicos, alimentos ou qualquer outro setor que exija o manuseio de materiais em pó.
Graças à sua precisão e velocidade, o Jumbot 1000 garante um rendimento de produção otimizado, ao mesmo tempo em que assegura segurança máxima e controle perfeito das emissões de pó.
-
Eficiência5
Uma braçadeira de alta capacidade para prender com segurança os big bags
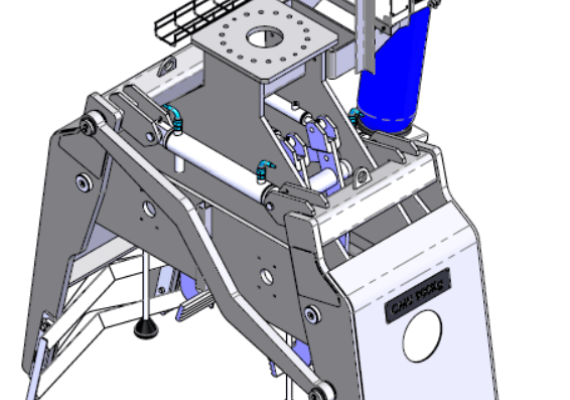
O elemento-chave do Jumbot 1000 é sua garra hidráulica para big bags, especialmente projetada para lidar com cargas pesadas e garantir a retenção ideal durante todo o ciclo de esvaziamento.
- Garra inicial do big bag: a garra se fecha ao redor do big bag cheio com uma força controlada, permitindo um manuseio estável sem o risco de queda ou rasgo do contêiner.
- Abertura gradual durante o esvaziamento: depois que o big bag estiver rachado na tremonha de esvaziamento, a garra principal se abre para liberar o produto do big bag.
- Garras para segurar o big bag vazio: para evitar que o big bag vazio seja liberado na tremonha, um segundo sistema de preensão equipado com garras ou ganchos de metal perfura a parte superior do big bag para mantê-lo suspenso até que seja esvaziado.
Um robô industrial de alto desempenho
O Jumbot 1000 é baseado em um robô FANUC M-2000iA/2300, projetado para atender às demandas dos ambientes industriais mais exigentes.
- Capacidade de carga: 2.300 kg, permitindo o manuseio de big bags de até 750 kg e até 1.000 kg em determinadas condições.
- Raio de trabalho: 3.734 mm, proporcionando ampla cobertura da área de trabalho.
- Velocidade: movimento rápido e fluido graças ao robô de 6 eixos.
- Programação intuitiva: interface de fácil utilização compatível com os principais padrões industriais (Profinet, Modbus, Ethernet/IP), facilitando a integração em linhas automatizadas existentes.
- Segurança incorporada: o sistema DCS (Dual Check Safety) garante uma operação segura em um ambiente restrito.
O uso desse robô oferece maior flexibilidade do que uma ponte rolante, eliminando as restrições de espaço e garantindo uma taxa de produção muito maior.
Esvaziamento otimizado: sistemas adaptáveis de tremonha e rachadura
O big bag é esvaziado por meio de uma tremonha de recebimento equipada com um sistema de perfuração de big bag personalizado, projetado para se adaptar às características do produto que está sendo transportado.
Sistemas de rachadura disponíveis:
- Lâminas em forma de U: para big bags com uma luva de saída e lâminas pontiagudas para big bags não retornáveis.
- Corte com jato de água: Para aplicações que exigem abertura sem liberação de partículas.
- Sistemas de massagem: Sistemas complementares para facilitar o fluxo de produtos densos ou compactos.
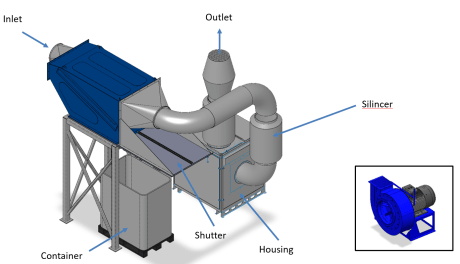
Gerenciamento de emissão de poeira:
- Anéis Pouyes: podem ser integrados para a captura eficaz de partículas finas e poeira.
- Conexão com redes de sucção existentes: Compatibilidade com sistemas de extração de poeira no local.
Gerenciamento automatizado de big bags vazios
Depois que o big bag é esvaziado, seu descarte é totalmente automatizado graças às diferentes configurações possíveis:
- Depósito em caixa: para gerenciamento manual pelo operador ou reutilização posterior.
- Compactador de big bag selado: para redução de volume e descarte higiênico de resíduos.
- Triturador de big bags: Para destruição imediata e reciclagem otimizada de materiais.
Esse sistema elimina a necessidade de manuseio manual de big bags vazios, reduzindo o risco de contaminação ambiental e o risco para o operador. Isso melhora a limpeza do local de produção.
O Jumbot 1000, um padrão de excelência para o setor
Com seu design totalmente automatizado, o Jumbot 1000 representa um grande avanço no esvaziamento de big bags. Ele permite :
- Produtividade otimizada, graças ao gerenciamento rápido e fluido do big bag.
- Maior segurança, eliminando a intervenção humana em estágios críticos do processo.
- Adaptabilidade total, com opções sob medida para atender às necessidades específicas de cada setor.
Na Palamatic Process, desenvolvemos soluções integradas para manuseio e processamento de pós, e o Jumbot 1000 é um exemplo perfeito disso. Tecnologia avançada, design robusto e automação total para um setor mais eficiente.
Entre em contato com nossos especialistas para obter um estudo personalizado e uma demonstração em condições reais.
Procedimento operacional do Jumbot 1000 - Esvaziamento automatizado de big bags
Modo de operação do Jumbot 1000 - Esvaziamento automatizado de big bags
O Jumbot 1000 esvazia big bags de forma 100% automática, desde o carregamento até a remoção do saco vazio, sem intervenção humana. Graças ao seu robô FANUC de alta capacidade, à garra hidráulica e ao sistema de perfuração otimizado, cada etapa é realizada com precisão, velocidade e segurança.
1. Captura e posicionamento do big bag
- O robô identifica o big bag usando seus sensores inteligentes e ajusta automaticamente sua garra.
- A garra hidráulica de alta capacidade agarra o big bag com firmeza, garantindo um manuseio estável.
- O robô orienta e abaixa o big bag sobre o funil, com posicionamento dinâmico preciso.
- Opção: remoção automática das tampas plásticas antes do esvaziamento.
2. Esvaziamento controlado por meio do funil de perfuração
- O big bag é pressionado contra um sistema de perfuração (lâminas em cruz, U, V ou jato de água) adaptado ao produto que está sendo manuseado.
- O produto flui imediatamente, otimizado por sistemas de massagem pneumática integrados.
- Um sistemade extração de poeira (anéis Pouyes) garante uma atmosfera de trabalho limpa, sem emissões voláteis.
3. Gerenciamento automatizado do big bag vazio
- Quando o esvaziamento é concluído, a pinça principal se abre, liberando o big bag.
- Uma pinça superior com garras perfurantes assume o controle, mantendo o big bag suspenso sem risco de queda.
- O robô transporta o big bag vazio para um dos sistemas de evacuação:
- Colocação em caixas para armazenamento temporário.
- Compactador de big bags à prova d'água para redução do volume.
- Triturador de big bags para destruição imediata e reciclagem.
4. Supervisão e integração industrial
- O Jumbot 1000 é compatível com todos os sistemas de controle industrial:
- Interface de toque intuitiva para gerenciamento em tempo real.
- Conectividade avançada (Profinet, Modbus, Ethernet/IP) para integração perfeita com a automação industrial.
- Sensores de controle para detecção precisa do fluxo de produção.
Com seu processo totalmente autônomo e seguro, o Jumbot 1000 garante produtividade máxima e gerenciamento otimizado de big bags, atendendo aos mais rigorosos requisitos dos setores químico, de plásticos e de alimentos.
Pontos fortes do equipamento
- 100% automatizado: separação, esvaziamento e evacuação sem intervenção humana.
- Precisão e velocidade: robô FANUC, pinça hidráulica e pinça de perfuração.
- Esvaziamento otimizado: tremonha feita sob medida, perfuração adaptada e remoção de poeira.
- Gerenciamento de big bags vazios: depósito, compactação ou trituração automatizados.
Media
Conheça nosso equipamento em fotos
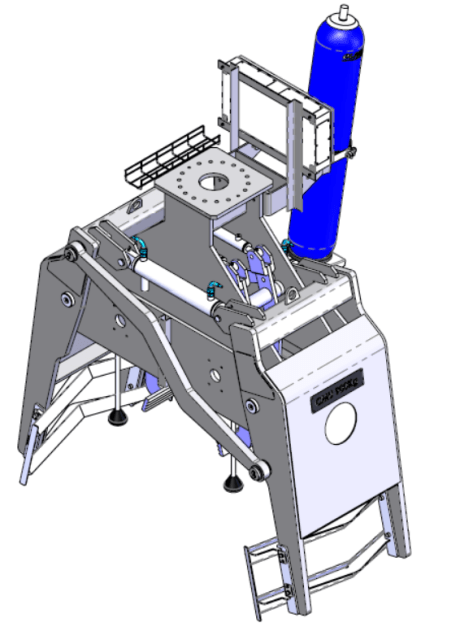
JUMBOT 1000 - garra hidráulica para elevação segura de tambores ou sacos grandes
Braçadeira hidráulica dedicada ao JUMBOT 1000 para manuseio de cargas pesadas

Equipamento JUMBOT 1000 com pinça robótica para manuseio automatizado
Garra hidráulica de alta resistência montada no JUMBOT 1000

JUMBOT 1000 com garra hidráulica
Detalhe da garra do JUMBOT 1000 na posição de elevação do big bag
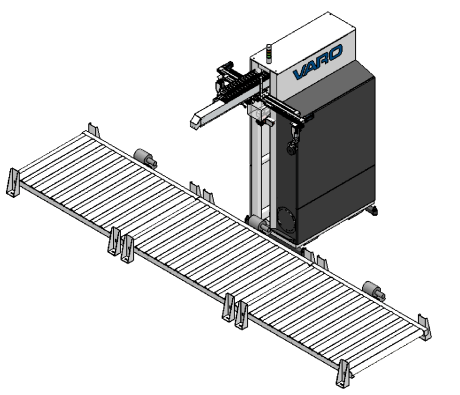
JUMBOT 1000 - sistema seguro de corte de filme plástico
Módulo de corte automático de filme retrátil - integrado ao JUMBOT 1000
JUMBOT 1000 - braço robótico com equipamento para remoção automatizada de filme de embalagem
Sistema de remoção de filme retrátil controlado pelo robô JUMBOT 1000
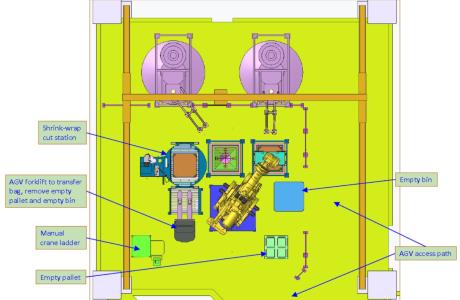
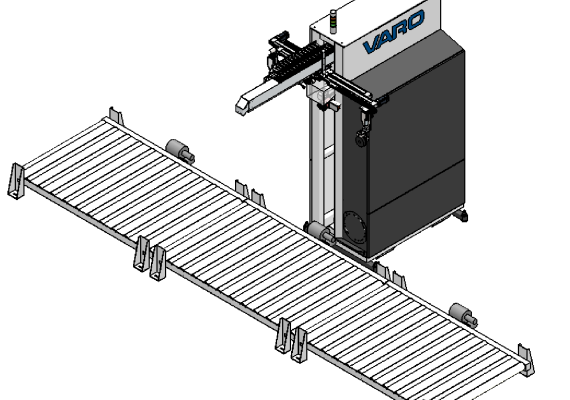
Diagrama de layout do JUMBOT 1000
Vista de planta da estação de trabalho do JUMBOT 1000 com robô, big bags, transportadores e zonas AGV


Features
Características técnicas
| Critérios | JUMBOT 1000-500S (Carga Simples) |
JUMBOT 1000-500M (Multi-Carga) |
JUMBOT 1000-1000S (Carga Simples) |
JUMBOT 1000-1000M (Multi-Carga) |
|---|---|---|---|---|
| Tipo de robô | FANUC M-2000iA/2300 | FANUC M-2000iA/2300 | FANUC M-2000iA/1700L | FANUC M-2000iA/1700L |
| Capacidade do robô (kg) | 2300 | 2300 | 1700 | 1700 |
| Capacidade de manipulação de big bag | Até 500 kg | Até 500 kg | Até 1000 kg | Até 1000 kg |
| Sistema de preensão | Garra hidráulica | |||
| Sistema de segurança | Garra tipo "coque" | Gancho superior para big bag | ||
| Número de pontos de coleta | 1 (padrão) | Até 2 (multi-coleta) | 1 (padrão) | Até 2 (multi-coleta) |
| Número de zonas de descarga | 1 (padrão) | Até 2 (multi-zona) | 1 (padrão) | Até 2 (multi-zona) |
| Sistema de corte do big bag | Opções: lâminas em U, em cruz ou corte com jato d'água. | |||
| Funil de descarga | Aço inox 304 ou 316; opção: captação de poeira, auxílio de escoamento com massagem pneumática | |||
| Gestão dos big bags vazios | CompactR / SchreddR / RollR opcional | |||
| Extração de poeira | Opcional (anéis de Pouyes) | Integrado com filtragem avançada | Opcional (anéis de Pouyes) | Integrado com filtragem avançada |
| Conectividade industrial | Padrão (Profinet/Modbus) ou integração completa da Indústria 4.0 (Ethernet, IoLink) | |||
Options
Opções disponíveis
-

Opções de gerenciamento de fluxo de big bags
- Transportadores motorizados para encaminhamento automático de sacos grandes para a estação de esvaziamento.
- Corte da tampa e sistema de vácuo para remoção automática antes do manuseio.
- Sistemas de pesagem integrados para monitoramento preciso dos volumes esvaziados.
- Gerenciamento centralizado do fluxo por meio de software industrial conectado.
-

Opções de segurança e otimização para esvaziamento automatizado de big bags
- Sistemas de monitoramento remoto para monitoramento do processo em tempo real.
- Fixação superior de big bags com braçadeira de pães ou lâminas estabilizadoras.
- Tremonha personalizável com lâminas em forma de U, V ou cruz ou corte por jato de água.
- Sistemas de massagem pneumática para fluidizar o fluxo de produtos densos.
- Sucção integrada (anéis Pouyes) para um ambiente livre de poeira.
-
Opções de gerenciamento para big bags vazios
- CompactR: Compactador de big bag à prova d'água para redução de volume.
- SchreddR: Triturador de big bags para destruição imediata e reciclagem.
- RollR: Compactador independente de big bag roundballer.






